




















Push / Pull is an interactive installation which consists out of two floating objects on two different playgrounds. The objects are round and move freely in any direction in the field. The objects are floating with a hovercraft like aircushion principal. They can move by themselves but can at the same time be moved by the audience. The audience interacts in a direct and physical way by pushing and moving the objects. They play a game with the objects but also with each other. When a visitor moves one of the objects, the other object will imitate the same movement. When someone else is moving the second object at the same time the contrary is taking place as well. This means that two visitors can communicate with each other through the objects. They start to push against each other while their physical locations are not related. It's important that the interface (the sensors detecting the audience moving the object) and the result (the object that moves itself) are both communicated through the object. You push for example the object and the object pushes you at the same time. The communication between the two objects consists purely out of digital messages going in both directions. The objects are physical interfaces, which communicate with each other via a network. The first version was using a local network. In the near future the objects will be able to communicate through the internet. The interaction is partly inspired on two of Hiroshi Ishii's interfaces developed at the MIT media-lab. The 'Curlybot' and 'inTouch'
Push / Pull is developed from the perspective of a world in which network communication play a growing and growing role. The internet is more and more used to, besides text, communicate image and sound. How ever the internet is almost not used for direct interaction. Push / Pull is a research at physical and tactile communication via a network. One important contradiction is the fact that in the real world communication has a continues character over time while digital communication is always discreet. Information is communicated is chops.
Push / Pull is not a project looking for the ultimate communication device which should imitate the real world experience but is emphasising the qualities of a certain medium. The objects have their own communication qualities but also have their own character. Within the conversation between the objects the behaviour is changing and partly directing the conversation.
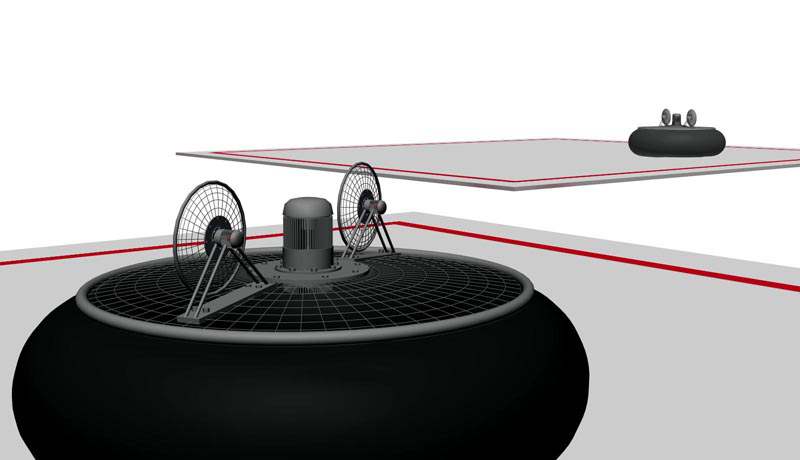
The objects are placed in two separate spaces of at least 10 by 10 meters each. They have a diameter of about 2,4 meters and are fully controllable in movement by two omni-directional wheels that have contact with the floor. The shape is round which creates a situation in which there is no front and backside. On one hand the movements of the objects is determined by their programmed behaviour but on the other hand this is permanently influenced by the movements the audience gives them. Their route is the sum of the input from the audience and there own behaviour. This is permanently communicated between the two objects. Although a visitor is touching one object it is also influencing the other object (and the other way around). Although the visitors are in different spaces they can 'feel' each other through the objects.
The interaction
As earlier described there is a direct relation between the movements
of the two objects. De visitors can 'touch' each other through the two
with each other communicating objects. However this is not the only
form of interaction. The objects have their own kind of behaviour
which can change over time. This behaviour is determined by two
parameters. First of all the objects memorise the moments they are
given by the visitors, reproduce them and process them into new
movement patterns. Because of this aspect the visitor is being
confronted by itself. Secondly the specific place of the objects in
the space can play a role in the behaviour. This behaviour is
comparable to an object in a complex magnetic field. The object can
have a pulling force to a specific place in the space. The object is
attracted by that location and wants to return there all the
time. Also there are locations that have the opposite role. They keep
pushing the object away. De balance of the different forms of
interaction is dependent of what the visitors do. The behaviour is
changing over time, which temps the visitors to keep exploring the
installation.
The network
Both objects are controlled by there own computer. The communication
in-between the objects is realised by a network connection between the
two computers. This network connection will be local when the
installation is presented at one location. There is an internet
connection between the objects when the two objects are presented at
different locations. Certain forms of interaction will still work
while other forms of interaction will be adapted to the medium
(internet). The delay, which is part of the medium, is incorporated in
the forms of interaction.
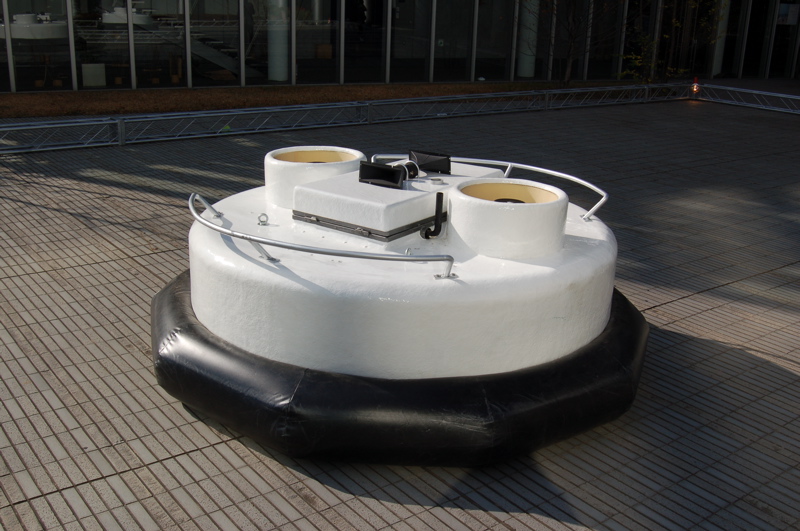
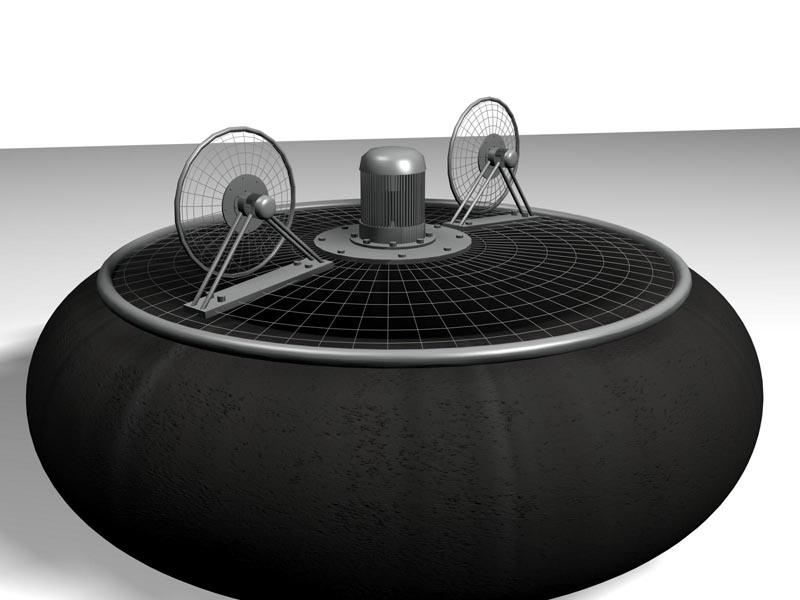
The objects
The objects are round with a diameter of 2.4 meters. They have an
inflatable rubber ring on the outside. The ring softens the object as
it bounces against the visitors and the walls of the space.
The movements
The weight of the objects is flying above the ground with the
hovercraft principle, this technique enables to move the large objects
rather easy. The two omni-wheels are the only part of the objects that
have contact with the ground. These wheels are hanging underneath the
air cushion as a separate unit. This unit can move freely so the
wheels keep in contact with the floor at all times, not influencing
the flying behaviour. The objects can spin around its centre and also
move linearly. The objects can move very controlled.
The sensors
Sensors are being used to determine the location and the rotation
of the objects in the space. From the location the speed and
acceleration can be calculated from which a very precise control of
the movement can be accomplished.
The sound
The objects have a build in speaker. The sound forms another level of
communication with the visitors independently from the movements. The
object can express itself via sound. The objects speak their own
language. The sound will continuously express the state/mood of the
object. The speed, the location and the direction of the object are
influencing the sound but also by the visitors which move the
objects. The object can express whether it wants or doesn't want to be
moved, whether it is pushing against you or moving with you and give
information about it's location in the space. The sound forms another
dimension in the communication between the visitor and the
objects.
| concept, realization: | Edwin van der Heide & Marnix de Nijs |